With the specification of Phases 0 & 1 of Eth2.0 reaching a comfortable level of detail, the research focus is shifting towards Phase 2: State Execution. One of the most important aspect of this phase is the handling of cross-shard communication, which determines the scalability of the sharded blockchain system, capability of execution environments, and the overall user experience. This post aims to provide readers with an overview of the design space for cross-shard communication, and look at the leading proposals among the available choices.
The design of cross-shard communication can be separated into two layers:
- Consensus layer, which handles the delivery of cross-shard messages. Design choices here affect the scalability of the sharded blockchain system.
- Execution layer, which concerns the interface for cross-shard transfers and contract calls. Design choices here affect the capabilities of execution environments.
Consensus Layer
The consensus layer of cross-shard communication is responsible for delivering cross-shard messages across partitions of our sharded blockchain system. The main challenge is keeping the design scalable while providing strong guarantees about the liveness of cross-shard messages. This layer can be divided into two parts:
- Send/Receive finality
- Data delivery
Send/Receive Finality
The source & destination shards have to finalize the send & receive of the cross-shard message respectively. The design choices for this are:
- Asynchronous: The source shard decides on sending the message first, and the destination shard can decide on receiving this message at any time in the future.
- Synchronous: The destination shard finalizes the receive of the message within a bounded period after the source shard finalizes the send. There are various ways to achieve this:
- Shards run some consensus protocol between themselves and decide on sending & receiving at the same time, e.g.: Sharded Byzantine Atomic Commit
- The source shard individually decides on sending first, and the destination shard's fork choice must receive within some period of time, e.g.: CBC Casper cross-shard messaging. This approach requires a shard hierarchy to exist between the source and destination, otherwise deadlocks can arise due to conflicting sends and receives.
- Put cross-shard messages on the beacon chain and force the destination shards to receive them before their next crosslink. (Note: this imposes a scalability limit, see protocol-delivered mechanism in the next section)
The synchronous approach is incompatible with the design of Eth2.0, since it requires the shards to coordinate the finalization of sends and receives in some manner.
Data Delivery
The previous mechanism concerns the finality of the send & receive, which is not the same as actually completing the sending or reception of the message. This is the task of the data delivery mechanism. (The difference between these will be highlighted in the "user-delivered" approach in this section)
The design of Eth2.0 enforces that any consensus activity happens only in the beacon chain. This means that all cross-shard messages must "flow" through the beacon chain. This presents us with two choices regarding the delivery of the cross-shard message data:
- Protocol-delivered: The protocol delivers the complete data of the cross-shard message by making it available on the beacon chain. This increases the overhead on the beacon chain and seriously affects the scalability of the system.
- User-delivered: The protocol comes to consensus only on the minimal information about cross-shard messages - merkle roots of cross-shard messages from each shard block. The user is then responsible for delivering the merkle branch associated with the cross-shard message to the destination shard. This approach is more Eth2.0-esque, since it follows the general principle of forming consensus only over merkle roots on the beacon chain.
Proposed Design for the Consensus Layer
In order to prioritize the scalability of the system in the tradeoff spectrum, the solution with asynchronous send/receive finality and user-delivered data is the leading proposal. The workflow for, say, sending ether from user 1 on EE1 in shard A to user 2 on EE2 in shard B is as follows:
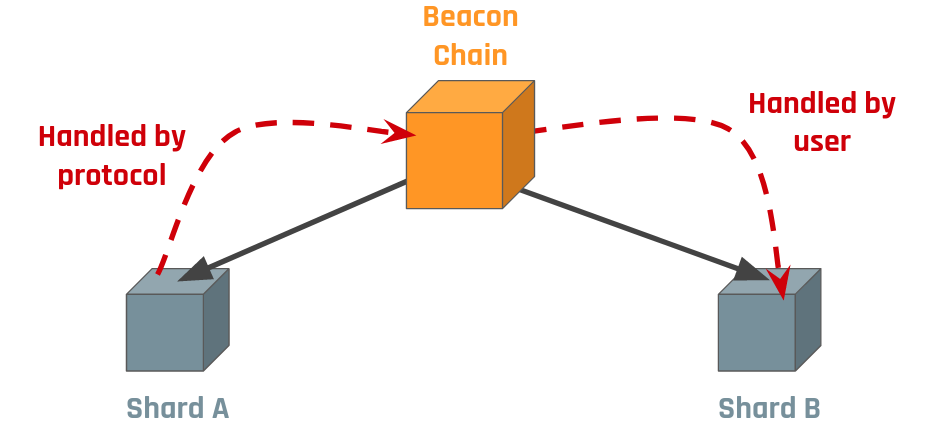
user 1creates transactionTX1onshard Athat debits it's balance fromEE1, and states the target to apply the credit asuser 2inEE2.- When a crosslink from
shard Ais included in the beacon chain, a merkle root that collects all cross-shard transactions since the last crosslink appears on the beacon chain. This is the evidence for the inclusion ofTX1inshard A. shard Beventually becomes aware of this merkle root on the beacon chain, anduser 2creates transactionTX2that shows the merkle proof of inclusion ofTX1toshard B. This allows a debit of the appropriate amount touser 2's balance onEE2.
Execution Layer
The execution layer of cross-shard communication provides an interface for users and contracts to make cross-shard transfers and contract calls. The design space of this layer has not been explored well yet. Recent discussions about this layer include:
- Cross-shard calls in execution environments
- Reliable transfer of value between shards
Cross-Shard Calls
The basic question that this component answers is: What happens when an EE calls a function of another EE on a different shard? The design space for this is not unique to sharded-blockchain-land. It's the same as any system where the execution of an application is separated across multiple partitions, e.g.:
- single threaded vs. multi-threaded systems
- single computer vs. network application systems
Inspired by the above systems, a simple design for this component would be the following types of calls (Vlad Zamfir pointed this out in Dec 2018):
- Asynchronous call with no return
- Asynchronous call with callback specified
- Synchronous call
Alternative approached include various advanced concurrent programming paradigms such as protolambda's commit capabilities post.